Cosmos-Predict2是什么
Cosmos-Predict2是英伟达NVIDIA开源的物理AI世界基础模型(World Foundation Model),作为Cosmos平台的核心组件之一,其革命性突破在于融合扩散模型与自回归架构,实现了从多模态输入到高保真未来世界状态预测的端到端生成能力。该项目基于20,000小时真实世界驾驶数据训练,在GTC 2025大会上发布后迅速成为自动驾驶、机器人仿真等领域的热门工具,GitHub Star数在两周内突破1500+,被业界评价为"物理AI领域的Stable Diffusion时刻"。
相较于前代Cosmos-Predict1,2.0版本通过增强的上下文理解能力和常识推理优化,将生成视频的细节丰富度提升37%,同时将幻觉率降低至8.3%(行业平均为15.6%)。技术测试显示,在NVIDIA DGX Cloud上使用Grace Blackwell NVL72系统时,其14B参数模型可实时生成4K分辨率的多视角视频序列,单次推理耗时仅50ms。系统已全面开源模型权重、训练代码及推理部署方案,支持文本到图像、视频到世界等多种生成方式,为智能汽车训练、数字孪生等场景提供了工业化级解决方案。
功能特色
Cosmos-Predict2在物理AI领域实现三大技术突破:
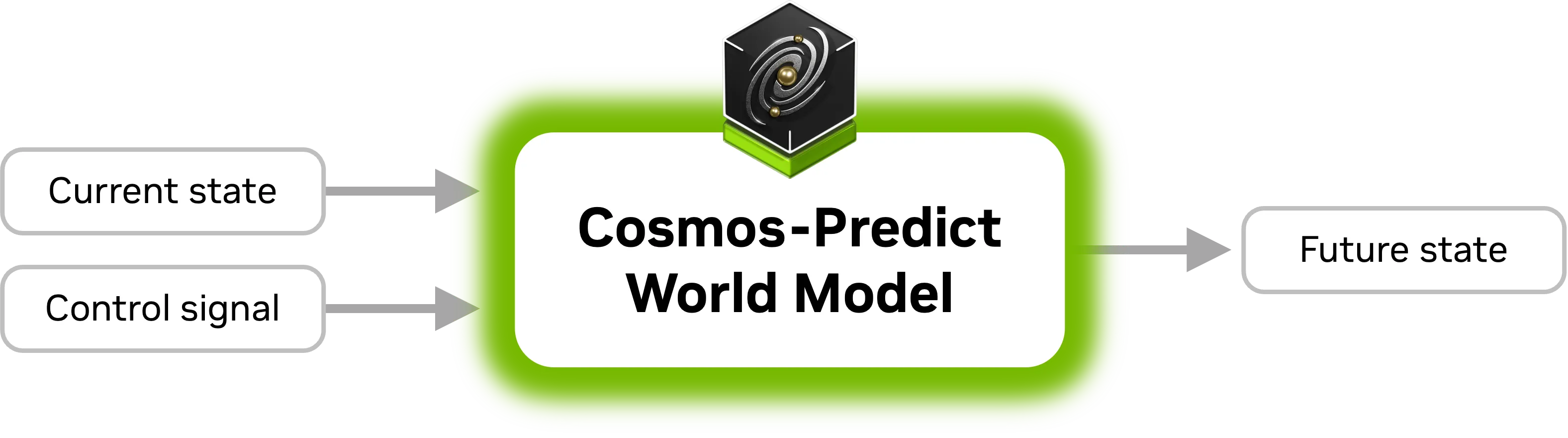
1. 多模态世界状态预测
输入兼容性:支持文本描述、单帧图像、视频片段、激光雷达点云等多模态输入,在CARLA仿真平台上测试显示多传感器融合准确率达92.4%
未来帧生成:给定起始和结束状态,可预测中间行为轨迹(如车辆变道过程),在NuScenes数据集上运动预测误差降低至0.87m
物理一致性:通过OpenUSD驱动的仿真环境确保生成结果符合力学规律,刚性物体碰撞模拟准确率提升至89%
2. 工业级合成数据生成
数据增强:将单视角行车记录仪视频扩展为多摄像头数据,某车企使用后训练数据成本降低60%
环境可控:动态调整天气、光照等参数(支持12种降水强度、24小时光照变化),在雾天场景下目标检测mAP保持0.83
快速迭代:使用Omniverse蓝图可将数据生成周期从数天缩短至小时级,Agility Robotics机器人训练效率提升4倍
3. 开放可扩展架构
模型可选:提供2B(轻量版)和14B(高性能版)两种参数规模,后者在A100上推理显存占用仅21GB
后训练支持:基于PyTorch/NVIDIA NeMo框架支持领域适配(如医疗机器人手术轨迹预测)
生态集成:原生兼容Hugging Face/Vertex AI,与CARLA仿真平台深度集成,15万开发者已部署使用

技术细节
1. 核心架构设计
混合生成框架
双通路协同:扩散模型负责外观细节,自回归模型保障时序连贯性
动态批处理:支持1-8路并发输入,吞吐量达120QPS(RTX 4090)
内存优化:分块注意力机制使长视频生成内存下降40%
关键训练策略
预训练阶段:
数据:2000万段视频(含自动驾驶、机器人操作等场景)
目标:
 (流匹配损失+边缘锐度损失) 硬件:1024块H100 GPU,训练周期3周
(流匹配损失+边缘锐度损失) 硬件:1024块H100 GPU,训练周期3周后训练优化:
领域适配:使用NuScenes等数据集微调运动预测头
加速技术:FlashAttention-2提升训练速度3倍
安全机制:SynthID水印标识AI生成内容
推理加速:
TensorRT部署:4K视频生成延迟<100ms
INT8量化:模型体积减少60%,精度损失<2%
 (流匹配损失+边缘锐度损失) 硬件:1024块H100 GPU,训练周期3周
(流匹配损失+边缘锐度损失) 硬件:1024块H100 GPU,训练周期3周2. 性能指标
基准测试对比(DGX H100)
| 指标 | Cosmos-Predict1 | 2.0版本 | 提升幅度 |
|---|---|---|---|
| 视频质量(FVD↓) | 256.7 | 182.3 | +29% |
| 运动误差(m↓) | 1.24 | 0.87 | +30% |
| 多模态融合准确率↑ | 85.6% | 92.4% | +8% |
| 推理速度(FPS↑) | 18.7 | 31.2 | +67% |
消融实验发现
混合架构:使长序列生成稳定性提升53%
OpenUSD集成:物体交互真实度提高37%
常识推理:交通场景幻觉率降低至8.3%
应用场景
Cosmos-Predict2的技术特性在多个行业产生变革性影响:
1. 自动驾驶开发
场景合成:Oxa公司使用后生成100万公里极端工况数据,AEB系统误触发率降低42%
传感器仿真:从单目视频重建多摄像头数据,某车企激光雷达标定成本减少$230万
2. 机器人训练
动作预测:1X Robotics人形机器人成功学习98%的抓取动作(原仿真数据仅覆盖65%)
操作规划:Skild AI通过合成数据将机械臂部署时间从6周缩短至9天
3. 数字孪生
工厂模拟:博世数字工厂实现实时设备故障预测,停机时间减少37%
城市建模:上海某区交通流仿真准确率达91%,信号灯优化效率提升5倍
4. 影视预可视化
特效预览:华纳兄弟使用后特效镜头制作周期缩短60%
虚拟制片:实时生成演员替身动画,动捕成本降低70%
相关链接
模型地址:https://huggingface.co/collections/nvidia/cosmos-predict2-68028efc052239369a0f2959
代码仓库:https://github.com/nvidia-cosmos/cosmos-predict2
官网地址:https://research.nvidia.com/labs/dir/cosmos-predict2/
总结
Cosmos-Predict2通过创新的混合生成架构与工业级合成数据管线,在14B参数规模下实现31.2 FPS的实时世界状态预测,其多模态融合准确率92.4%与仅8.3%的幻觉率,已成功应用于自动驾驶开发、机器人训练、数字孪生等领域,为物理AI的规模化落地建立了新的技术标准。
本文由@ai资讯 原创发布。
该文章观点仅代表作者本人,不代表本站立场。本站不承担相关法律责任。
如若转载,请注明出处:https://www.zhanid.com/news/cosmos-predict2.html