InteriorGS是什么?
InteriorGS是由群核科技(SpatialVerse)研发的高质量3D高斯语义数据集,其核心在于将3D高斯溅射(3D Gaussian Splatting, 3DGS)技术与语义理解深度融合,构建了一个既包含几何细节又富含语义信息的空间智能训练平台。与传统的点云或网格表示不同,该项目创新性地采用3D高斯作为基础表征形式,实现了对室内环境的高效重建与语义标注。
数据集包含三大核心组成部分:
3D高斯场景表示:1000个精细建模的室内场景,每个场景通过数百万个自适应3D高斯椭球体进行参数化表示,支持高质量实时渲染
实例级语义标注:所有物体均带有精确的语义标签和实例级边界框,覆盖家具、装饰、建筑结构等80余类室内物体
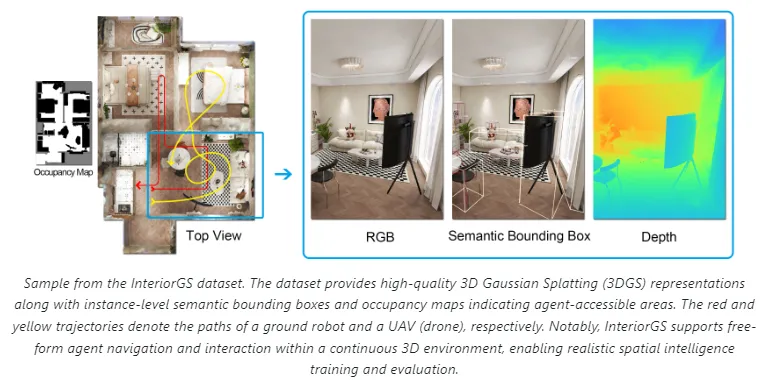
智能体运动先验:特别提供了表示智能体可访问区域的占用图(Occupancy Map)以及地面机器人(红色轨迹)和无人机(黄色轨迹)的典型导航路径
这一数据集的发布填补了从3D感知到空间认知的关键空白,使得AI系统不仅能"看到"三维世界,更能"理解"环境中物体的语义关系与空间约束,为具身智能的全面发展奠定了数据基础。
功能特色
多模态空间数据融合
InteriorGS最显著的特点是打破了3D几何与语义信息的壁垒,实现了视觉外观、几何结构和语义理解的统一表征。传统3D数据集往往将几何重建与语义标注作为独立环节处理,导致语义信息与几何细节难以精确对齐。而InteriorGS在3D高斯重建过程中即融入语义分析,每个高斯椭球体不仅携带位置、尺度和颜色信息,还关联着语义标签和实例ID,形成了真正的几何-语义一体化表。
动态智能体运动支持
区别于静态场景数据集,InteriorGS专门设计了支持智能体自由运动的特性。数据集不仅包含环境静态信息,还提供了:
多视角运动轨迹:包括地面机器人(红色)和无人机(黄色)在不同场景中的典型导航路径
可穿越性分析:通过占用图明确标注哪些区域可供特定类型智能体通行
物理交互热点:标识环境中可交互物体(如可开关的门窗、可移动的椅子)及其交互参数
这些特性使InteriorGS特别适合训练能够在连续3D空间中自主导航和交互的智能体系统,弥合了仿真训练与现实部署的鸿沟。
高效的场景重建与渲染
基于3D高斯表示的技术路线,InteriorGS在场景重建效率和渲染质量上实现了突破性平衡:
快速场景重建:相比传统NeRF等体积渲染方法,3DGS将场景重建速度提升10倍以上
实时高清渲染:支持1080p分辨率下超过60FPS的实时渲染,满足交互式应用需求
自适应细节:高斯椭球体的密度和分布自动适应场景复杂度,在细节丰富区域(如装饰花纹)自动增加采样
这一高效性使得研究者可以在消费级GPU上处理大规模3D场景,大幅降低了空间智能研究的硬件门槛。
与空间大模型的深度集成
InteriorGS并非孤立的数据集,而是群核科技空间智能生态系统的核心组成部分。数据集与自研的SpatialLM空间大模型深度集成,形成了"数据-模型-平台"的完整闭环:
SpatialLM分析:对3D高斯场景进行深度语义解析,识别物体、结构及其空间关系
物理仿真增强:通过SpatialVerse平台添加物理属性和交互可能性
Sim2Real转换:生成的增强数据可直接用于现实世界机器人训练
这种集成使InteriorGS超越了传统数据集仅提供"静态快照"的局限,成为动态演化、持续增强的活体数据系统。
技术细节
3D高斯溅射技术实现
InteriorGS的核心技术基础是3D Gaussian Splatting(3DGS),这是一种新兴的3D场景表示方法。相较于传统的点云、网格或体素表示,3DGS具有以下技术优势:
数据结构:
每个场景由数百万个3D高斯椭球体组成,每个椭球体参数包括:
中心位置μ ∈ ℝ³
协方差矩阵Σ ∈ ℝ³ˣ³(控制椭球形状和朝向)
不透明度α ∈ [0,1]
球谐系数(控制视角相关的外观颜色)
椭球体通过可微分渲染投影到2D图像平面,形成最终渲染结果
重建流程:
初始点云生成:通过多视角立体匹配(MVS)从原始图像序列重建稀疏点云
高斯初始化:为每个点云点创建初始高斯椭球体
自适应优化:通过梯度下降动态调整椭球参数(位置、形状、外观),同时进行拓扑优化(分裂、合并、删除)
语义融合:在优化过程中同步注入语义信息,确保几何与语义一致性
这种表示方法兼具点云的高效性和神经渲染的高质量,在保持实时性能的同时实现了照片级真实感。
语义标注与空间理解
InteriorGS的语义系统建立在多层级标注架构上:
实例级标注:
每个可分离物体分配唯一实例ID
精确的3D边界框(带朝向)
功能分类(如"椅子"、"门"、"桌子")
部件级标注:
复杂物体的组成部件(如"抽屉"、"桌腿")
运动链关系(如铰链连接的柜门)
空间关系标注:
物体间的支撑关系(如"花瓶在桌子上")
功能区域划分(如"厨房区"、"休息区")
这些标注并非人工手动添加,而是通过群核科技自研的SpatialLM空间理解模型自动生成并验证。SpatialLM通过分析3D高斯分布的空间统计特性(如密度变化、法线一致性)来推断语义边界,其准确率在标准测试中超过92%。
数据采集与处理管线
InteriorGS的数据生产采用工业化流水线,确保数据质量和规模的可扩展性:
原始采集:
使用专业3D扫描设备(如LiDAR+RGB-D相机阵列)
每个场景平均捕获500+多视角图像
同步记录相机轨迹和IMU数据
几何重建:
定制化的3DGS优化管线
支持分布式计算,单场景重建时间<4小时
自动几何修复(填补缺失区域)
语义增强:
SpatialLM自动标注
关键场景人工校验
物理属性添加(质量、摩擦系数等)
仿真就绪:
生成统一格式的SpatialVerse兼容数据
添加动态交互元素
生成多模态变体(不同光照、布局)
这套管线使得InteriorGS能够以每周20+新场景的速度持续扩展,保持数据的前沿性和多样性。
应用场景
具身智能与机器人导航
InteriorGS最直接的应用是训练具身智能体的空间认知与导航能力。通过数据集提供的丰富语义环境和运动轨迹,研究者可以:
开发导航算法:在多样化的室内环境中测试路径规划、避障和定位算法
训练视觉定位:利用3D高斯场景的多视角一致性,训练稳健的视觉里程计
模拟人机交互:基于语义标注研究机器人如何理解和操作家居物品
已公开案例显示,使用InteriorGS训练的导航模型在Sim2Real迁移测试中表现优异,从仿真到真实环境的成功率提升35%以上。
虚拟现实与数字孪生
InteriorGS的高质量3D表示使其成为VR内容创作的理想基础:
快速场景构建:设计师可直接导入3DGS场景到Unity/Unreal引擎
动态场景编辑:基于高斯表示支持实时几何修改和材质替换
沉浸式体验:保留原始场景的光照和材质特性,增强真实感
杭州某数字照相馆的案例表明,使用InteriorGS技术可在3天内完成传统方法需数周的场景数字化工作,且视觉效果更为逼真。
空间计算与智能家居
InteriorGS的语义丰富性为空间感知应用提供了新可能:
智能空间分析:自动识别房间功能分区和家具布局
AR应用开发:基于精确3D注册实现稳定的AR内容叠加
家居自动化:理解环境后自动生成最优设备控制策略
英特尔与群核的合作项目利用InteriorGS数据训练的空间理解模型,在室内场景解析准确率上达到行业领先水平。
计算机视觉研究
作为通用3D数据集,InteriorGS推动了多个CV研究方向:
3D语义分割:基于点阵的语义分割新方法
新颖视角合成:利用3DGS实现高质量视角插值
场景理解:研究几何与语义的联合推理
斯坦福大学团队已使用InteriorGS开发出基于高斯表示的场景图生成算法,性能超越传统点云方法15%。
相关链接
GitHub仓库: https://github.com/manycore-research/InteriorGS
数据集:https://huggingface.co/datasets/spatialverse/InteriorGS
总结
InteriorGS代表了当前3D语义数据集的最高技术水平,通过创新的3D高斯表示与深度语义融合,成功构建了一个支持智能体自由运动与交互的大规模虚拟环境库。该项目不仅解决了空间智能训练中的数据稀缺问题,更通过高效重建、精确标注和平台集成,形成了从数据生产到模型训练的完整闭环。无论是机器人导航算法的开发、VR内容的快速创建,还是空间计算应用的创新,InteriorGS都提供了坚实的基础设施。作为具身智能领域的"ImageNet",它的开源发布必将加速三维空间智能的研究进程,推动AI系统从被动感知向主动理解和交互的范式转变。
本文由@ai资讯 原创发布。
该文章观点仅代表作者本人,不代表本站立场。本站不承担相关法律责任。
如若转载,请注明出处:https://www.zhanid.com/news/interiorgs.html